
大家都在找: 码垛机 / 四轴机器人 / 桁架机械手/ 助力机械手 |
|
|
气动机械手工作原理是什么样的 二维码
发表时间:2019-08-29 11:08 气动机械手常以4~6公斤力/㎡的压缩空气为动力,驱动执行机构完成各种机械动作的一种工业机械手,今天带您揭晓气动机械手的工作原理。
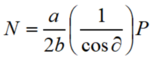
一、气动机械手优点 1.动力源的介质(空气)可从大气中吸取,废气又可排向大气,非常方便。气动机械手干净、机构简单 ,它可应用于食品、纺织、包装等要求没有污染的场合。又由于空气的化学性能稳定可用于高温、低温、幅射、高粉尘等条件恶劣的场合 2. 压缩空气在管道内流动的阻力小、 流速快、因而气动机械手的动作快、生产效率高。又由于控制系统亦可采用气动与气压驱动执行机构相配合,就形成了全流体控制系统。使设计、制造、维修都很方便。 二、气动机械手的组成 气动机械手一般有下面几个主要组成部件 1. 执行机构:包括手指(即抓取机构)、手腕、手臂等构件。机械手的完善程度,就取决于执行机构。 2. 驱动机构:是驱动手臂等执行机构发生动作的动力机构,常用的有气动、液压、电力和机械等四种动力形式。气动机械手,就是指驱动机构采用气压传动而言。 3. 控制机构:它是控制机械手按规定程序运动的装置。 4. 辅助装置:包括基体、气缸、储气罐等。 三、气动机械手工作原理 最常见的气动抓取机构有钳爪式及真空吸盘等形式。 如下图所示是一种常见的两手指抓取机构。穿过手腕4的气缸活塞杆3,在其端部固定安装着圆柱销2,当拉杆3向上拉时,圆柱销就在两指1的滑槽中移动,带动手指1绕O1和O2两点回转,夹紧工件。当拉杆3向下移动时,使手指松开工件。P为作用在拉杆上的驱动力,即气缸的拉力,N为手指的握力。 可推导出,此种形式手指的握力N为:
P:气缸的驱动力; a:手指的回转支点到对称中心线的距离; b:手抓回转支点到两“V”型槽中心线垂直距离;
文章分类:
行业新闻
|



地址:广东省东莞市长安镇景阳街2号2栋104室
联系人:肖生 联系电话:153 2295 7991
电话: 0769-82261286 邮箱: yisitesales@163.com
东莞佰富彩是一家专注生产助力机械手,桁架机械手,码垛机,四六轴机器人,装箱机器人,后段包装产线的厂家,如果你有这方面的需求,欢迎来电咨询:东莞佰富彩工程师。
